
Advances in Machine Learning & Artificial Intelligence(AMLAI)
ISSN: 2769-545X | DOI: 10.33140/AMLAI

Research Article - (2020) Volume 1, Issue 1
Development of Novel Average Neuro Fuzzy Hybrid Control Technique for Robot Navigation in Unknown Environments
2DPS, Rourkela, India
Received Date: Dec 03, 2020 / Accepted Date: Dec 12, 2020 / Published Date: Dec 19, 2020
Copyright: Parhi Dayal R, et al. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Abstract
The current research focuses on development and analysis of novel Average Neuro-Fuzzy Controller for path planning and navigation of mobile robot in highly cluttered environment. During the investigation various researches related to robot, control and navigation have been analysed. For mapping the environments several distance sensors mounted on the robot are used. The sensors readings about the environments have been segmented into various sectors (front, left, right and back sectors). Using the sensors reading robots negotiate with the obstacles present in the environments during navigation from start to goal point. Experimental and simulation results obtained during the current research from various exercises are in agreement and are within 3%. Comparisons between results show the effectiveness of the proposed technique for robot navigation in complex environments. This technique can be used to address various engineering optimisation problems.
Keywords
Average Neuro-Fuzzy, Robot, Mobile, Artificial Intelligence, Navigation Control
Introduction
Papers discussed about various AI techniques for control of robots in various complex environments [1-5]. AI techniques play important roles for finding solutions to optimisation problems in engineering and scientific fields [6-8]. Several researchers have used AI techniques for various types of robots control. Paper discusses about meta heuristic algorithm for trajectory planning of robots in various environments [9-12]. Papers give paths for using Artificial Immune system as an AI technique for navigation control of robots. Bacteria Foraging technique is one of the biologically inspired technique used for solving various optimisation problems [13-17]. Particle Swarm Optimisation method is a nature inspired algorithm used for path planning of dynamic robots [18-20]. Paperhas described functioning of manipulator in unknown situations using AI methodology [21]. Differential Evolution Algorithm is one of the best suited techniques for solving various engineering problems [22]. It can be hybridised with other methods to obtain efficient hybrid technique. Neural network is one of the smart biological inspired AI technique used for solving various engineering problems [23-26]. Using neural network robots are auto controlled and successfully find path in cluttered environments [27-30]. Neural network can be efficiently implemented for robot control and for addressing different engineering problems [31-33]. Papers have discussed about Cuckoo Search methodology to address navigational control of mobile robots subjected to various environmental conditions [34-36]. A new variant artificial intelligence technique such as Dayani intelligent method has been used and described in the paper for controlling robots in unknown environments [37]. Daykun-Bip artificial intelligence technique can be employed for addressing various optimisation problems in engineering fields as well as to analyse navigational control of robots [38]. Papers focus on use of neuro-fuzzy controller for robot path determination in complex environments [39-43]. Neuro-fuzzy technique can also be used to address various engineering problems and to get suitable solutions [44-47]. Fuzzy inference techniques can be used as a well suited artificial intelligence method for solving various problems in engineering fields [48-53]. Papers discuss about fuzzy logic method to control mobile robot during path planning [54-57]. In fuzzy inference method difference member-ship functions are used to address robot control in efficient manner [58-61].
Ant Colony AI technique has significant contributions in solving various optimisation problems. With rate of pheromone deposition and decay the ant colony AI technique find an optimised solution in complex situations [62-64]. Papers discuss on finite element method to analyse various engineering problems. Firefly algorithm is one of the community driven algorithms used for robot navigation control [65-71]. Firefly algorithm can also be used for solving various engineering optimisation problems. AI techniques can be used for fault and damage identifications of various mechanical and dynamic structures used for building various parts of robots [72-79]. Neural network and Fuzzy inference can be hybridised to get neuro-fuzzy AI controller [80-81]. Paper discusses about invasive weed optimisation technique for navigation of robot in unknown environments [82]. The paper discusses on nature driven Bat algorithm used for path planning of robot in complex environment [83]. Gait analysis of dynamic humanoid robot is analysed and discussed in paper [84]. Out of several biological inspired methods, Genetic algorithm is found to be an efficient method for addressing robotic related navigation problems [85-88]. Genetic algorithm can be used as a controller for various robotic hardware platforms [89-90]. Harmonic Search algorithm has been used to control under water robot in obstacles prone environments [91]. Artificial Immune system is a biological inspired algorithm and can be used for handling various optimisation problems [92-94]. Robot kinematic analysis is discussed by several researchers, required for studying robot movements [95-97]. Papers have discussed about mobile computing for intelligent communication purposes [98-99].
Artificial potential field method can be used for robot navigation in unknown fields [100-101]. Real time navigation for robot is described and analysed by researchers [102]. Mathematically formulated rule based techniques have been used by researchers for robot motion and path analysis [103-104]. Papers describe simulated annealing technique for motion analysis of various types of robots [105-106]. Analysis of vibration signatures of various dynamic parts of robots using artificial intelligence methods have been described in papers by various researchers [107-120]. In papers various researchers have used soft computing methods to control various types of robots [121-122]. Swarm intelligence is one of the robust AI techniques being used by researchers to address various optimisation problems [123-127]. Many researchers have used regression based analysis for robot control and navigation [128-130]. Paper focuses on sensor based robot navigation in unknown environments [131]. The current paper discusses and analyses on Average Neuro-Fuzzy Hybrid (ANFH) control technique for navigation control of mobile robot in unknown fields. The details of ANFH controller is discussed in the below section.
Description and Analysis of Average Neuro-Fuzzy Hybrid Controller
In this section analysis and description of Average Neuro-Fuzzy Hybrid (ANFH) controller (Figure 1) has been carried out. The distance sensors mounted in the robot map the surrounding environment comprising of obstacles and target. The inputs to neural and fuzzy segments in the average neuro-fuzzy hybrid controller are left (LOS), right (ROS) and front FOS) obstacles distances obtained from the sensors. Outputs from the individual fuzzy and neural controllers are Steering-Angle-1(SA1) and Steering-Angle-2 (SA2) respectively. Gaussian membership functions are used in fuzzy segment of the hybrid controller. In neural segment of hybrid controller five layers back-propagation neural network has been used. The input and output layers consist of three and one neurons respectively. The three hidden layers consist of six, twelve and four neurons respectively. The Final Steering Angle (FSA) has been obtained by taking the average of SA1 and SA2. Using the FSA obtained from ANFH, robot negotiates with obstacles while trying to find the target. During the process various simulation and experimental exercises are conducted. Hemisson robot is used for carrying out all experimental exercises for navigational purpose [132]. Comparisons have been done between simulation and experimental results and are shown in Table 1 for five no. of exercises. A comparison is also shown as pictorial form (Figure 2 A-F) in six steps for simulation and experimental exercises.
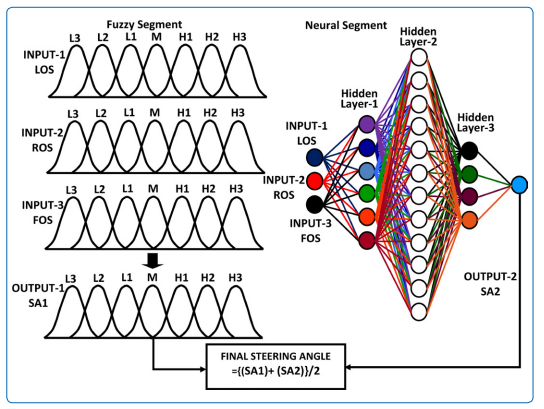
Figure 1: Schematic View of Average Neuro-Fuzzy Hybrid Controller
Table 1: Simulation and Experimental Path Lengths and Time Taken during various
https://www.opastpublishers.com/scholarly-images/24-67d928ce6708d-development-of-novel-average-neuro-fuzzy-hybrid-control-tech.png
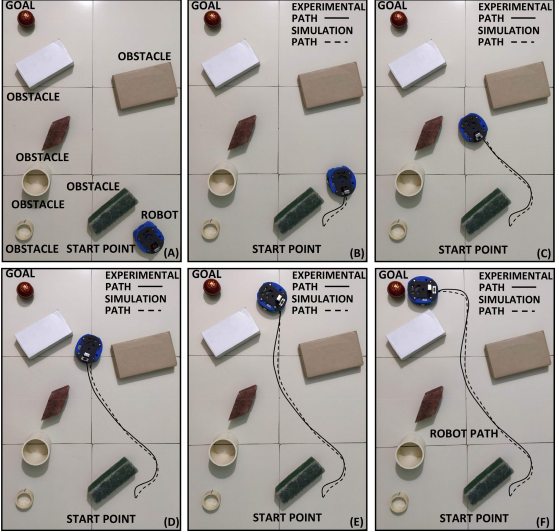
Figure 2: Simulation and Experimental Result of Hemisson Robot [132] from Start to Goal Point
Conclusion
In the current investigation development, analysis and application of a novel Average Neuro-Fuzzy Hybrid controller has been carried out. Using the data obtained from sensors mounted in the robot as inputs, ANFH controller estimates the final steering angle for navigation of robot from start to goal point while avoiding obstacles. FSA is calculated by taking the average of SA1 and SA2. SA1 and SA2 are calculated from Fuzzy and Neural segments of ANFH controller. Using ANFH controller in simulation and experimental modes, robot finds target while avoiding obstacles. During comparison between simulation and experimental results obtained from navigational exercises show an agreement among the results within 3%. From the results it is concluded that ANFH controller can be used efficiently for robot navigational purpose. ANFH artificial intelligence technique can also be used for solving other optimisation problems in engineering fields. In the future other hybrid techniques will be investigated for solving the robot navigation problem in cluttered and unknown environments.
References
1. Well hausen L, Ranftl R, Hutter M (2020) Safe Robot Navigation via Multi-Modal Anomaly Detection. IEEE Robotics and Automation Letters 5: 1326-1333.
2. Dos Reis DH, Welfer D, De Souza Leite Cuadros MA, Gamarra DF (2019) Mobile Robot Navigation Using an Object Recognition Software with RGBD Images and the YOLO Algorithm. Applied Artificial Intelligence 33: 1290-1305.
3. Pandey KK, Pol MS, Parhi DR (2014) Using an AI Technique Navigation and Path Planning for Mobile Robot on Webots Platform. IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) 2014: 27-31.
4. Parhi DR, Mohanty PK (2012) A Study of various methodologies used for navigation of autonomous mobile robot. International Sciâ?ence Press: India,4: 19-26.
5. Rawat H, Parhi DR, Priyadarshi BK, Pandey KK, Behera AK, et al. (2018) Analysis and Investigation of Mamdani Fuzzy for Control and Navigation of Mobile Robot and Exploration of Different AI Techniques Pertaining to Robot Navigation.Emerging trends in Engineering, Science and Manufacturing (ETESM - 2018), IGIT, SARANG.
6. Sahu C, Kumar PB, Parhi DR (2018) An intelligent path planning approach for humanoid robots using adaptive particle swarm optimization. International Journal on Artificial Intelligence Tools, 27: 1850015.
7. Dash AK, Parhi DR (2012) A vibration based inverse hybrid intelligent method for structural health monitoring, International Journal of Mechanical and Materials Engineering, 6: 2.
8. Kumar PB, Sethy M, Parhi DR (2019) An intelligent computer vision integrated regression based navigation approach for humanoids in a cluttered environment, Multimedia Tools and Applications,78: 11463-11486.
9. Patle BK, Pandey A, Parhi DR (2019) Jagadeesh A. A review: On path planning strategies for navigation of mobile robot. Defence Technology, 15: 582-606. 10. Parhi DR, Singh MK (2009) Navigational strategies of mobile robots: a review. International Journal of Automation and Control, 3:114-134.
11. Mohanty S, Parhi DR, Das SS, Pradhan SK, Pandey KK, et al. (2018) Target Finding and Obstacle Avoidance Behaviour Study of a Humanoid Robot with the Help of Embedded Hybrid Fuzzy-Immune Method. International Journal of Artificial Intelligence and Computational Research (IJAICR) 10:121-137.
12. Mitic M, Vukovic N, Petrovic M, Miljkovic Z (2018) Chaotic metaheuristic algorithms for learning and reproduction of robot motion trajectories. Neural Computing and Applications, 30:1065-1083.
13. Deepak BB, Parhi DR, Kundu S (2012) Innate immune based path planner of an autonomous mobile robot. Procedia Engineering, 38: 2663-2671.
14. Parhi DR, Deepak BB, Mohana J, Ruppa R, Nayak M, et al. (2012) Immunised navigational controller for mobile robot navigation. Soft computing techniques in vision science, Springer, Berlin, Heidelberg 2012: 171-182.
15.Deepak BB, Jha AK, Parhi DR (2011) Path planning of an autonomous mobile robot using artificial immune system. Int J Comput Math Sci, 1 :1-6.
16. Zhang C, Yu Y, Wang Y, Zhou M (2020) Takagi–Sugeno Fuzzy Neural Network Hysteresis Modeling for Magnetic Shape Memory Alloy Actuator Based on Modified Bacteria Foraging Algorithm. International Journal of Fuzzy Systems 22 :1314-1329.
17. Muni MK, Parhi DR, Kumar PB (2020) Improved Motion Planning of Humanoid Robots Using Bacterial Foraging Optimization, Robotica, Cambridge University Press.
18. Deepak BB, Parhi DR (2012) PSO based path planner of an autonomous mobile robot. Open Computer Science, 2 :152- 168.
19. Panigrahi PK, Ghosh S, Parhi DR (2014) Comparison of GSA, SA and PSO based intelligent controllers for path planning of mobile robot in unknown environment. J. Electr. Comput. Electron. Commun. Eng 8:1523-1532. 20. Pandey A, Panwar VS, Hasan ME, Parhi DR (2020) V-REPbased navigation of automated wheeled robot between obstacles using PSO-tuned feedforward neural network. Journal of Computational Design and Engineering.
21. Kumar PB, Verma NK, Parhi DR, Priyadarshi D (2019) Design and control of a 7 DOF redundant manipulator arm. Australian Journal of Mechanical Engineering, Taylor & Francis 1-12.
22. Sahu S, Kumar PB, Parhi DR (2019) Analysis of hybrid CSA-DEA method for fault detection of cracked structures. Journal of Theoretical and Applied Mechanics 57: 369-382.
23. Kanezaki A, Nitta J, Sasaki Y Goselo (2017) Goal-directed obstacle and self-location map for robot navigation using reactive neural networks. IEEE Robotics and Automation Letters 3: 696-703.
24. Parhi DR, Singh MK (2009) Real-time navigational control of mobile robots using an artificial neural network. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science 223: 1713- 1725.
25. Pham DT, Parhi DR (2003) Navigation of multiple mobile robots using a neural network and a Petri Net model. Robotica 21:79.
26. Mohanty JR, Verma BB, Parhi DR, Ray PK (2009) Application of artificial neural network for predicting fatigue crack propagation life of aluminum alloys. Association of Computational Materials Science and Surface Engineering 1: 133-138.
27. Das SS, Parhi DR, Mohanty S, Pradhan SK, Pandey KK, et al. (2018) Behavioural Study of Dynamic Robot During Path Planning in an Environment using Neural-Rule-Based Artificial Intelligence Technique.International Journal of Artificial Intelligence and Computational Research (IJAICR) 10 :1-16
28. Rath AK, Das HC, Parhi DR, Kumar PB (2018) Application of artificial neural network for control and navigation of humanoid robot. Journal of Mechanical Engineering and Sciences 12: 3529-3538.
29. Pandey KK, Parhi DR (2020) Trajectory planning and the target search by the mobile robot in an environment using a Behavior -Based neural network approach. Robotica 38: 1627-1641.
30. Chhotray A, Parhi DR (2019) Navigational control analysis of two-wheeled self-balancing robot in an unknown terrain using back-propagation neural network integrated modified DAYANI approach. Robotica 37:1346-1362.
31. Jena PC, Parhi DR, Pohit G (2019) Dynamic Investigation of FRP Cracked Beam Using Neural Network Technique. Journal of Vibration Engineering & Technologies 7: 647-661.
32. Nanda J, Das LD, Choudhury S, Parhi DR (2020) Revelence of Multiple Breathing Cracks on Fixed Shaft Using ANFIS and ANN. InInnovative Product Design and Intelligent Manufacturing Systems Springer, Singapore 2020: 599-618.
33. Das SS, Parhi DR, Mohanty S, Pradhan SK, Chhotray A, (2018) Analysis of Path Architecture of Mobile Robotic Platform with the Help of Cuckoo-Neuro Search Algorithm. International Journal of Artificial Intelligence and Computational Research (IJAICR) 2018: 10: 67-83.
34. Abd El Aziz M, Hassanien AE (2018) Modified cuckoo search algorithm with rough sets for feature selection. Neural Computing and Applications 29: 925-934.
35. Mohanty PK, Parhi DR (2013) Cuckoo search algorithm for the mobile robot navigation. International Conference on Swarm, Evolutionary, and Memetic Computing, Springer, Cham 2013: 527-536.
36. Parhi DR, Kumar PB, Behera AK, Pandey KK, Chhotray A, et al. (2018) Contour Analysis of a Dynamic Robot in a Cluttered Environment using Genetic-Cuckoo Search Method. International Journal of Artificial Intelligence and Computational Research (IJAICR) 10: 51-66.
37. Parhi DR, Chhotray A (2018) Development and analysis of DAYANI arc contour intelligent technique for navigation of two-wheeled mobile robot. Industrial Robot: An International Journal, Emerald Publishing Limited 5: 688-702.
38. Parhi DR, Kumar PB (2019) Smart navigation of humanoid robots using DAYKUN-BIP virtual target displacement and petri-net strategy, Robotica, Cambridge University Press, 4: 626-640.
39. Pandey A, Parhi DR (2016) Multiple mobile robot’s navigation and obstacle avoidance using minimum rule based ANFIS network controller in the cluttered environment. International Journal of Advanced Robotics and Automation 1: 1-11.
40. Singh MK, Parhi DR, Pothal JK (2009) ANFIS approach for navigation of mobile robots. In 2009 International Conference on Advances in Recent Technologies in Communication and Computing IEEE 2009: 727-731.
41. Pandey A, Kumar S, Pandey KK, Parhi DR (2016) Mobile robot navigation in unknown static environments using ANFIS controller. Perspectives in Science 8: 421- 423.
42. Mohanty PK, Parhi DR (2014) Path planning strategy for mobile robot navigation using MANFIS controller. In Proceedings of the International Conference on Frontiers of Intelligent Computing: Theory and Applications (FICTA) 2013 Springer, Cham 2014: 353-361.
43. Kundu S, Parhi DR, Deepak BB (2012) Fuzzy-neuro based navigational strategy for mobile robot. International Journal of Scientific & Engineering Research 6: 1-6.
44. Parhi DR, Mohanty PK (2016) IWO-based adaptive neurofuzzy controller for mobile robot navigation in cluttered environments. The International Journal of Advanced Manufacturing Technology 83: 1607-1625.
45. Yadao AR, Parhi DR (2017) Dynamic Analysis of FixedFixed Type Cracked Rotor in Viscous Medium. Journal of Vibration Engineering & Technologies 5: 535-546.
46. Pandey A, Kashyap AK, Parhi DR, Patle BK (2019) Autonomous mobile robot navigation between static and dynamic obstacles using multiple ANFIS architecture. World Journal of Engineering 16: 275-286.
47. Pradhan SK, Parhi DR, Panda AK (2006) Navigation of multiple mobile robots using rule-based neuro-fuzzy technique. International Journal of Computational Intelligence 3:142-152.
48. Fathinezhad F, Derhami V, Rezaeian M (2016) Supervised fuzzy reinforcement learning for robot navigation. Applied Soft Computing 40: 33-41.
49. Parhi DR, Mohanta JC (2011) Navigational control of several mobile robotic agents using Petri-potential-fuzzy hybrid controller. Applied Soft Computing, Elsevier 4: 3546-3557.
50. Singh MK, Parhi DR, Bhowmik S, Kashyap SK (2008) Intelligent controller for mobile robot: Fuzzy logic approach. The 12th International Conference of International Association for Computer Methods and Advances in Geomechanics (IACMAG) 2008: 1-6.
51. Mohanty PK, Parhi DR (2014) Navigation of autonomous mobile robot using adaptive network based fuzzy inference system. Journal of Mechanical Science and Technology, Korean Society of Mechanical Engineers 7: 2861-2868.
52. Parhi DR, Choudhury S (2011) Smart crack detection of a cracked cantilever beam using fuzzy logic technology with hybrid membership functions, Journal of Engineering and Technology research, Academic Journals 8: 270-278.
53. Parhi DR, Singh MK (2008) Intelligent fuzzy interface technique for the control of an autonomous mobile robot. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, SAGE Publications 11: 2281-2292.
54. Rath AK, Parhi DR, Das HC, Muni MK, Kumar PB, et al. (2018) Analysis and use of fuzzy intelligent technique for navigation of humanoid robot in obstacle prone zone, Defence technology, Elsevier 6: 677-682.
55. Pandey A, Parhi DR (2014) MATLAB simulation for mobile robot navigation with hurdles in cluttered environment using minimum rule based fuzzy logic controller, Procedia technology Elsevier 1: 28-34.
56. Mohanty PK, Parhi DR, Jha AK, Pandey A (2013) Path planning of an autonomous mobile robot using adaptive network based fuzzy controller,2013 3rd IEEE International Advance Computing Conference (IACC), IEEE 2013: 651- 656.
57. Mohanty S, Parhi DR, Das SS (2018) Control strategy of a real mobile robot using singleton takagi sugeno fuzzy inference methodology within the frame work of artificial intelligence techniques. Emerging Trends in Engineering, Science and Manufacturing (ETESM-2018), IGIT Sarang, India 2018: 576.
58. Panigrahi PK, Ghosh S, Parhi DR. (2014) A Comparison of Mamdani and Sugeno Based Fuzzy Controller for Mobile Robot to Avoid Static Obstacles. In5th International Elsevier Conference Electronics and Computer Science (IEMCON) 2014: 226-231.
59. Mohanty S, Parhi DR, Das SS, Pradhan S (2018) Path Control Using Hybrid Mamdani Sugeno Fuzzy Controller for a Real Mobile Robot. International Journal of Applied Artificial Intelligence in Engineering System 2018: 1-21.
60. Mohanty S, Parhi DR, Das SS, Pradhan SK, Chhotray A, et al. (2018) Experimental Investigation on Traversed Path of Moving Robot Using Rule-Based-Fuzzy Integrated Method in a Densely Populated Environment. International Journal of Artificial Intelligence and Computational Research (IJAICR) 10: 33-49.
61. Deepak BB, Parhi DR (2019) New strategy for mobile robot navigation using fuzzy logic. In Information Systems Design and Intelligent Applications Springer, Singapore 2019: 1-8.
62. Jiao Z, Ma K, Rong Y, Wang P, Zhang H, et al. (2018) A path planning method using adaptive polymorphic ant colony algorithm for smart wheelchairs. Journal of Computational Science 25: 50-57.
63. Kumar PB, Sahu C, Parhi DR (2018) A hybridized regressionadaptive ant colony optimization approach for navigation of humanoids in a cluttered environment. Applied Soft Computing, Elsevier 68: 565-585.
64. Sahu C, Parhi DR, Kumar PB (2018) An approach to optimize the path of humanoids using adaptive ant colony optimization. Journal of Bionic Engineering, Springer Singapore 4: 623-635.
65. Khan IA, Parhi DR (2013) Finite element analysis of double cracked beam and its experimental validation. Procedia Engineering, Elsevier 51: 703-708.
66. Parhi DR, Dash AK (2011) Application of neural network and finite element for condition monitoring of structures. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science 225: 1329- 1339.
67. Jena PC, Parhi DR, Pohit G. (2014) Theoretical, Numerical (FEM) and Experimental Analysis of composite cracked beams of different boundary conditions using vibration mode shape curvatures. International Journal of Engineering and technology 2: 509-518.
68. Parhi DR, Muni MK, Sahu C (2012) Diagnosis of Cracks in Structures Using FEA Analysis. International Science Press: India (IJAAIES) 4: 27-42.
69. Lagunes ML, Castillo O, Soria J, Garcia M, Valdez F, et al. (2019) Optimization of granulation for fuzzy controllers of autonomous mobile robots using the Firefly Algorithm. Granular Computing 4: 185-195.
70. Patle BK, Pandey A, Jagadeesh A, Parhi DR (2018) Path planning in uncertain environment by using firefly algorithm. Defence technology 14: 691-701.
71. Patle BK, Parhi DR, Jagadeesh A, Kashyap SK (2017) On firefly algorithm: optimization and application in mobile robot navigation. World Journal of Engineering 14: 65-76.
72. Agarwalla DK, Parhi DR (2013) Effect of crack on modal parameters of a cantilever beam subjected to vibration. Procedia Engineering 51: 665-669.
73. Behera RK, Pandey A, Parhi DR (2014) Numerical and experimental verification of a method for prognosis of inclined edge crack in cantilever beam based on synthesis of mode shapes. Procedia Technology 14: 67-74. 74. Thatoi DN, Das HC, Parhi DR (2012) Review of techniques for fault diagnosis in damaged structure and engineering system. Advances in Mechanical Engineering 4: 327569.
75. Parhi DR, Behera AK (1997) Dynamic deflection of a cracked beam with moving mass. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science 211: 77-87.
76. Das HC, Parhi DR (2009) Application of neural network for fault diagnosis of cracked cantilever beam. In2009 World Congress on Nature & Biologically Inspired Computing (NaBIC) Dec 9 IEEE 2009: 1303-1308.
77. Jena PK, Thatoi DN, Nanda J, Parhi DR (2012) Effect of damage parameters on vibration signatures of a cantilever beam. Procedia engineering 38: 3318-3330.
78. Parhi DR, Behera AK (1997) Dynamic deflection of a cracked shaft subjected to moving mass. Transactions of the Canadian Society for Mechanical Engineering 21: 295-316.
79. Jena PC, Parhi DR, Pohit G (2012) Faults detection of a single cracked beam by theoretical and experimental analysis using vibration signatures. IOSR Journal of Mechanical and Civil Engineering 4: 1-18.
80. Adarsh S, Ramachandran KI (2018) Design of sensor data fusion algorithm for mobile robot navigation using ANFIS and its analysis across the membership functions. Automatic Control and Computer Sciences 52: 382-391.
81. Mohanty PK, Parhi DR (2015) A new hybrid optimization algorithm for multiple mobile robot’s navigation based on the CS-ANFIS approach. Memetic Computing 7: 255-273.
82. Mohanty PK, Parhi DR (2014) A new efficient optimal path planner for mobile robot based on Invasive Weed Optimization algorithm. Frontiers of Mechanical Engineering 9: 317-330.
83. Ghosh S, Panigrahi PK, Parhi DR (2017) Analysis of FPA and BA meta-heuristic controllers for optimal path planning of mobile robot in cluttered environment. IET Science, Measurement & Technology 11: 817-828.
84. Kashyap AK, Pandey A, Chhotray A, Parhi DR (2020) Controlled Gait Planning of Humanoid Robot NAO Based on 3D-LIPM Model. Available at SSRN 3552498: 7.
85. Elhoseny M, Shehab A, Yuan X (2017) Optimizing robot path in dynamic environments using genetic algorithm and Bezier curve. Journal of Intelligent & Fuzzy Systems 33: 2305-2316.
86. Sahu S, Parhi DR (2014) Automatic design of fuzzy MF using Genetic Algorithm for fault detection in structural elements. In2014 Students Conference on Engineering and Systems, IEEE 28: 1-5.
87. Rath AK, Parhi DR, Das HC, Kumar PB, Muni MK, et al. (2019) Path optimization for navigation of a humanoid robot using hybridized fuzzy-genetic algorithm. International Journal of Intelligent Unmanned Systems 7: 112-119.
88. Behera SK, Parhi DR, Das HC (2018) Application of genetic algorithm for crack diagnosis of a free-free aluminum beam with transverse crack subjected to axial and bending load. Journal of Mechanical Engineering and Sciences 12: 3825- 3851.
89. Kumar PB, Parhi DR (2020) Navigational analysis of a humanoid using genetic algorithm with vision assistance. Multimedia Tools and Applications 3: 1-20.
90. Mohanty S, Parhi DR, Das SS, Pradhan SK, Pandey KK, et al. (2018) Motion and Track Analysis of a Several Wheeled Robot using Hybrid Genetic-Radial-Basis-Neural AI Technique Subjected to Different Environmental Conditions. International Journal of Artificial Intelligence and Computational Research (IJAICR) 10: 85-101.
91. Kundu S, Parhi DR (2016) Navigation of underwater robot based on dynamically adaptive harmony search algorithm. Memetic Computing 8: 125-146.
92. Deng L, Ma X, Gu J, Li Y, Xu Z, et al. (2016) Artificial immune network-based multi-robot formation path planning with obstacle avoidance. International Journal of Robotics and Automation 31: 233-242.
93. Deepak BB, Parhi DR (2016) Control of an automated mobile manipulator using artificial immune system. Journal of Experimental & Theoretical Artificial Intelligence 28: 417- 439.
94. Deepak BB, Parhi DR (2013) Intelligent adaptive immunebased motion planner of a mobile robot in cluttered environment. Intelligent Service Robotics 6: 155-162.
95. Parhi DR, Deepak BB (2011) Kinematic model of three wheeled mobile robot. Journal of Mechanical Engineering Research 3: 307-318.
96. Parhi DR, Behera AK, Pandey KK, Chhotray A, Kumar PB, et al. (2018) Study and Analysis of Hybrid Genetic-AdaptiveRulebase Method for Path Control of Multiple Wheeled Mobile Robotic Agent. International Journal of Artificial Intelligence and Computational Research (IJAICR) 10: 17- 32.
97. Deepak BB, Parhi DR (2011) Kinematic analysis of wheeled mobile robot. Automation & Systems Engineering 5: 96-111.
98. Elappila M, Chinara S, Parhi DR (2018) Survivable path routing in WSN for IoT applications. Pervasive and Mobile Computing 43: 49-63.
99. Elappila M, Chinara S, Parhi DR (2020) Survivability Aware Channel Allocation in WSN for IoT applications. Pervasive and Mobile Computing 61: 101107.
100. Kumar PB, Rawat H, Parhi DR (2019) Path planning of humanoids based on artificial potential field method in unknown environments. Expert Systems 36: 12360.
101. Mohanta JC, Parhi DR, Patel SK, Pradhan SK (2016) RealTime Motion Planning of Multiple Mobile Robots Using Artificial Potential Field Method. Journal of Advance Computational Research 1: 1-16.
102. Patle BK, Parhi DR, Jagadeesh A, Sahu OP (2017) Real Time Navigation Approach for Mobile Robot. JCP 12: 135-142.
103. Kumar SM, Kumar MD, Parhi DR, Prasad SM (2012) Intelligent controller for mobile robot based on heuristic rule base network. In Advanced Materials Research, Trans Tech Publications Ltd 403: 4777-4785.
104. Muni MK, Kumar PB, Parhi DR, Rath AK, Das HC, et al. (2020) Path Planning of a Humanoid Robot Using RuleBased Technique. In Advances in Mechanical Engineering Springer, Singapore 2020: 1547-1554.
105. Kashyap AK, Parhi DR, Kumar S (2020) Dynamic stabilization of NAO humanoid robot based on whole-body control with simulated annealing. International Journal of Humanoid Robotics 2020: 2050014.
106. Das SS, Parhi DR, Mohanty S, Kumar PB, Pradhan SK, et al. (2018) Path and Movement Study of a Biped Robot using Simulated-Annealing-Neural Method in the Presence of Target and Obstacles. International Journal of Artificial Intelligence and Computational Research (IJAICR) 10: 103-119.
107. Parhi DR, Kumar DA (2009) Analysis of methodologies applied for diagnosis of fault in vibrating structures. International Journal of Vehicle Noise and Vibration 5: 271-286.
108. Yadao AR, Singh RP, Parhi DR (2014) Influence of parameters of cracked rotor system on its vibration characteristics in viscous medium at finite region. In Applied mechanics and materials Trans Tech Publications Ltd 592: 2061-2065.
109. Parhi DR, Agarwalla DK (2012) Determination of Modified Natural Frequencies of Fractured Fixed-Fixed Beam by Numerical & Experimental Method. IJAAIES 4: 95-101.
110. Parhi DR, Behera AK (1998) The study of virtual mass and damping effect on a rotating shaft in viscous medium. Journal-Institution of Engineers India Part MC Mechanical Engineering Division 1998: 109-113.
111. Nanda J, Das S, Parhi DR (2014) Effect of Slenderness ratio on crack parameters of simply supported Shaft. Procedia materials science 6: 1428-1435. 112. Jena SP, Parhi DR, Subbaratnam B (2017) Parametric evaluation on the response of damaged simple supported structure under transit mass. In Gas Turbine India Conference, American Society of Mechanical Engineers 2017: 58516.
113. Parhi DR, Behera AK, Sahoo PK (1997) Dynamic Response of Beams with a Moving Mass. Journal-Aeronautical Society of India 49: 69-75.
114. Das HC, Parhi DR (2008) Modal analysis of vibrating structures impregnated with crack. International Journal of Applied Mechanics and Engineering 13: 639-652.
115. Parhi DR, Behera AK (1997) Vibration Characteristics of a Spinning Shaft in Viscous Liquid. Journal-Aeronautical Society of India 49: 174-179.
116. Kumar PB, Parhi DR (2017) Vibrational characteristics and stress analysis in a human femur bone. Materials Today: Proceedings 4: 10084-10087.
117. Jena SP, Parhi DR (2018) Dynamic response and analysis of cracked beam subjected to transit mass. International Journal of Dynamics and Control 6: 961-972.
118. Agarwalla DK, Parhi DR (2013) Diagnosis of Modal Characteristics of Aircraft Wing Model subjected to Irregularities. ijB 3: 1.
119. Jena SP, Parhi DR, Jena PC (2015) Dynamic Response of Damaged Cantilever Beam Subjected to Traversing Mass. International Journal for Technological Research in Engineering 7: 860-865.
120. Behera SK, Parhi DR, Das HC (2018) Numerical, experimental and fuzzy logic applications for investigation of crack location and crack depth estimation in a free-free aluminum beam. Vibrations in Physical Systems 29: 1-20.
121. Parhi DR, Pradhan SK, Panda AK, Behera RK (2009) The stable and precise motion control for multiple mobile robots. Applied Soft Computing 9: 477-487.
122. Kumar PB, Muni MK, Parhi DR (2020) Navigational analysis of multiple humanoids using a hybrid regression-fuzzy logic control approach in complex terrains. Applied Soft Computing 89: 106088.
123. Jhang JY, Lin CJ, Lin CT, Young KY (2018) Navigation control of mobile robots using an interval type-2 fuzzy controller based on dynamic-group particle swarm optimization. International Journal of Control, Automation and Systems 16: 2446-2457.
124. Parhi DR, Pothal JK, Singh MK (2009) Navigation of multiple mobile robots using swarm intelligence. In2009 World Congress on Nature & Biologically Inspired Computing (NaBIC) 2009: 1145-1149.
125. Jena PK, Parhi DR (2015) A modified particle swarm optimization technique for crack detection in cantilever beams. Arabian Journal for Science and Engineering 40: 3263-3272.
126. Parhi DR, Sahu C, Kumar PB (2018) Navigation of multiple humanoid robots using hybrid adaptive swarmâ?adaptive ant colony optimisation technique. Computer Animation and Virtual Worlds 29: 1802.
127. Kumar PB, Sahu C, Parhi DR (2018) Navigation of humanoids by a hybridized regression-adaptive particle swarm optimization approach. Archives of Control Sciences 2018: 349-378.
128. Kumar PB, Sahu C, Parhi DR, Pandey KK, Chhotray A, et al. (2019) Static and dynamic path planning of humanoids using an advanced regression controller. Scientia Iranica 26: 375- 393.
129. Kumar PB, Sahu C, Parhi DR (2020) Intelligent navigation of a self-fabricated biped robot using a regression controller. Scientia Iranica 27: 262-272.
130. Kumar PB, Parhi DR (2020) Intelligent hybridization of regression technique with genetic algorithm for navigation of humanoids in complex environments. Robotica 38: 565-581.
131. Arslan O, Koditschek DE (2019) Sensor-based reactive navigation in unknown convex sphere worlds. The International Journal of Robotics Research 38: 196-223.
132. https://www.k-team.com/